
参考答案:
【问题1】
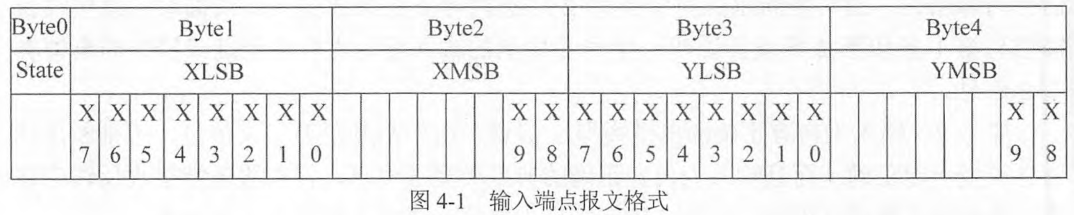
(1)0x70
(2)0xFF
(3)0x1或者1
(4)0x7F
(5)0x1或者1
【问题2】
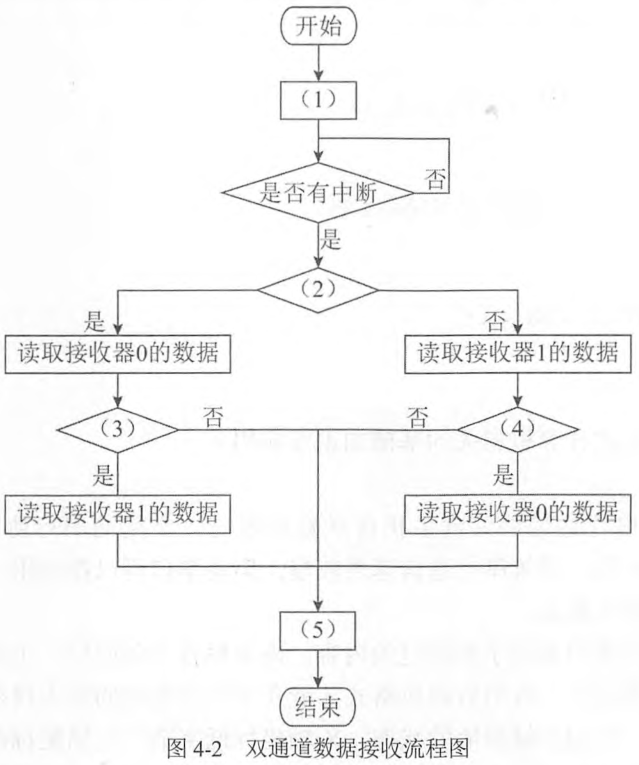
(1)设备中断使能
(2)接收器0有数据
(3)接收器1有数据
(4)接收器0有数据
(5)清除中断标识
【问题3】
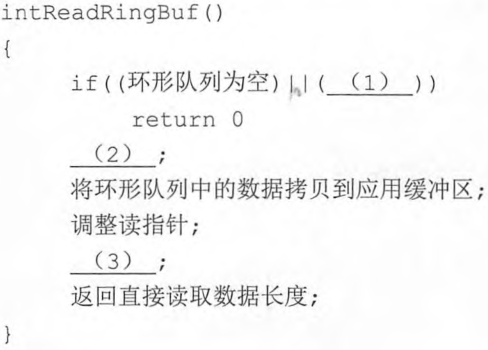
1.互斥操作用来保证共享数据操作的完整性。通过互斥锁保证任一时刻只能有一个应用访问共享对象。
2.
(1)bReadLock为真或bReadLock== TRUE
(2)bReadLock=TRUE或等效形式
(3)bReadLock=FALSE或等效形式
详细解析:
本题考查嵌入式计算机的相关知识。
【问题1】
根据题干可以得到当前的位置为:(1022/2,766/2)=((511,388)),分别可以求得X轴的坐标就是0x1FF,Y轴的坐标是0x17F。由于是按照小端格式进行存放(低字节存放在低地址)。X轴的低字节就是0xFF,X轴的高字节就是0x1;;Y轴的低字节就是0x7F,Y轴的高字节就是0x1。
【问题2】
该题考查中断方面的相关知识,根据流程图填写相关内容。
【问题3】
该题考查操作系统中并发任务互斥操作的相关知识。互斥操作用来保证共享数据操作的完整性。通过互斥锁保证任一时刻只能有一个应用访问共享对象。