

参考答案:
【问题1】
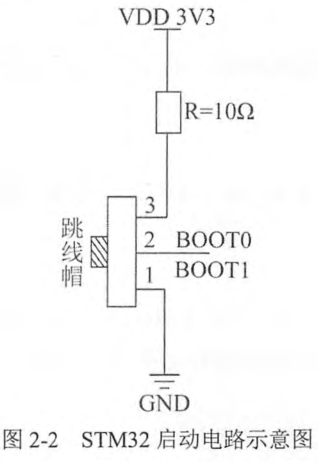
管脚1和管脚2
【问题2】
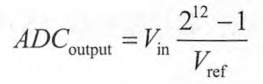
2978
【问题3】
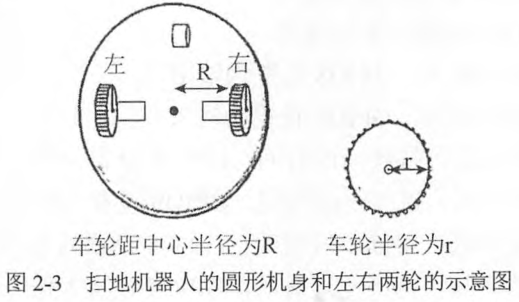
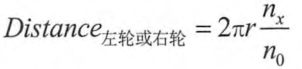
125.6厘米
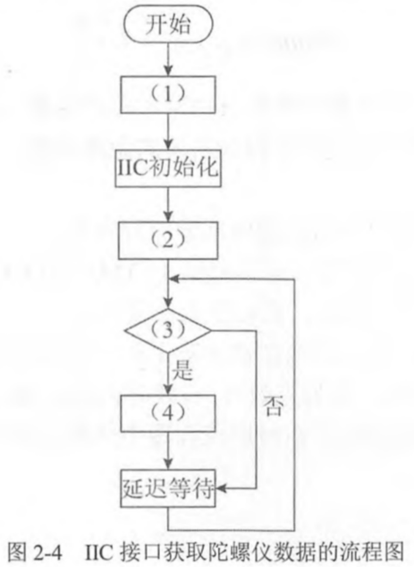
【问题4】
(1)C
(2)G
(3)I
(4)M
详细解析:
此题考查嵌入式系统硬件设计的相关知识。
【问题1】如果STM32的选择从主Flash启动,从表2-1可以看出,BOOT0为0,BOOT1任意值,所以,图2-2中的跳线帽应该连接管脚1和管脚2。
【问题2】当红外测距仪数据模拟电压Vin为2.4V时,代入公式可以计算得到DC的输出值是2978。注意要转化为十进制。
【问题3】根据公式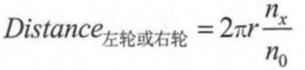 ,r=5cm,no=564,nx=2256,将这些值代入公式就可以得到需要的距离数值。
,r=5cm,no=564,nx=2256,将这些值代入公式就可以得到需要的距离数值。
【问题4】需要注意的是,流程已经在题干中说明了:
1.陀螺仪和STM32之间通过IIC接口进行数据通信,陀螺仪和STM32之间还有一个信号线(STM32的GPIO9)和陀螺仪芯片复位线(STM32的GPIO8,低电平为复位,高电平为非复位)。
2.在STM32通过IIC接口获取陀螺仪数据前,需要先对陀螺仪复位并查询信号线的有效性(GPIO9高为有效,低为无效),有效时再通过IIC接口读取陀螺仪的数据。